facebook_UP2018.06.19
�������Fairy tale 002_08
facebook_UP2018.06.19
�������Fairy tale 002_08
�m�����n����킩��̔��z�@
��W�b�@��s�@�̏璷�V�X�e���̉���Ɣ�e����������̐�ꗣ�E
�}�O�l�g�[���猻���B-737MAX�܂�
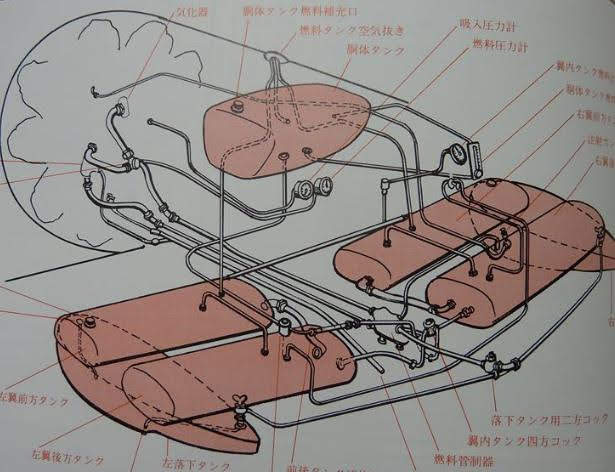
�@��s��24������A���������̈��@�̔����@�͐��͂������A�����@����ɂ���A�܂葀�c�Ȑ^���ʂ̓��̃^���N����A50L�̔R���������o���Ă���B
�@����������Ă���ΔR���͑�������A�������Ȃ���Ύ嗃����g�p����B
�@������40�����Ȃ̂ŁA�܂����̃^���N�͖��^���ł������낤�B
�@�G3�@�͂܂���炢�t���Ă���B
�@���������͂����Łu�葁���G���W���E�X�C�b�`����ċ}������s���Ȃ���A�킴�Ƌ@�̂��X�s�������A���Ă��ꂽ�ƌ��������Ēnj����Ă���G�̍U������������v�Ə����Ă���B
�@�Ԃ̃G���W���̓C�O�j�b�V�����R�C���ŁA�o�b�e���[�Ȃǂ���̓d���d�����������āA�_�v���O�ɉΉԂ��X�p�[�N�����A�R��������������C���A�V�����_�[�s�X�g���ň��k���A���̃K�X��������B
�@���̏ꍇ�A�o�b�e���[�┭�d�@�Ȃǂ̌��d���������G���W���͎~�܂�B
�@���V�v���i�s�X�g���G���W���j�@�̔����@�́A�ԂɎg���Ă���C�O�j�b�V�����R�C���ɕς��āA�����̃G���W���ŋ쓮�����}�O�l�g�[�Ŏ��Ȕ��d�A���ȏ��������A�_�v���O�ɍ��d���𑗂�B�}�O�l�g�[�̓o�b�e���[���Ȃ��Ƃ��A�Ԃʼn]���W�F�l���[�^�[��C���o�[�^�[���Ȃ��Ƃ��A�G���W���̎��Ȋ����^�]���\�Ƃ���B�����ă}�O�l�g�[��2��G���W���ɑg�ݍ��܂�A�_�v���O��1�V�����_�[��2�����B
�@�V�����_�[���̍����C��2�̉ΉԂŔ�������̂Ō������悭�Ȃ邵�A1�n�����̏Ⴕ�Ă��o�b�N�A�b�v������̂ň��S���B��s�@�̑厖�Ȍn�����d�悤����v�z�̌��_���낤�B
 |
�@�}�O�l�g�[��ւ�SW �@���c�Ȑ��ʌv��Ղ̉����Ɏ��t�����Ă���B�����O���E�̌n���̌��S�������ꂼ���ւ��Ċm�F����B�_�����ȊO��BOTH�ʒu�ɂ��ė��n�������Ɏg�p����B |
�@��؍q��@�B�q�@�̃~�X�Ń\�A�̂ɐi�����ď�q����Ƃ����Ă��ꂽ�������������B
�@1983�N�̂��Ƃ����AINS�i Inertial Navigation System�����q�@���u�j�ɗ����Ĕ�s�����B
�@���̍���INS�͋@�B���W���C���̃v���b�g�z�[���ɏ悹���AXYZ3���̉����x�Z���T�[�œ��������x���A���Ԃ�2��ϕ����Č��݈ʒu���Z�o�����B
�@�厖�Ȃ̂̓v���b�g�t�H�[���̐����o�����x���B�����瓖���̂���ȑ��u�́A���1��قǂ̗����X�y�[�X�ƂȂ邵�A�d�����A�^�p�ł̓W���C���̐��m�ȋN���i�����o���j�ɂ����Ԃ�v�����B���̓����N���[�U�[���g���ȂNj@�B�������Ȃ����������y���A�N�����v���ɂȂ����B�ܘ_���܂�GPS�ƃn�C�u���b�h�����A�����͎��ԂƂ��Ɍ덷���~�ς��Ă䂭�B
�@GPS�̂Ȃ�����́A�Ⴆ�Αΐ������@�B�o���O�̃W���C���N����3���Ԃ�����ꍇ���������B
�@���q�@�ł͂����܂ŕK�v�Ȃ����A���₻��Ȃ��Ƃł͏��ƂƂ��Ă����藧���Ȃ��B
�@�������Ă��ꂽ��؍q��̃W�����{�@�́A�����グ���Ƀ����v�ʒu����v�b�V���o�b�N���Ă��܂����̂��B
�@�G���W�j�A�ڐ��ʼn]���Ə�q����荞��ł��āA�@�̂��h���̂����Ȃ̂ɁA���낤���Ƃ��v�b�V���o�b�N���B����ɂ���ăv���b�g�t�H�[���͌X���A�����x�v�Z�͓����덷��傫���~�ς��A����Ń\�A�̂ɓ����Ă��܂����B
�@���̌ド�C���e�Ђ̃p�C���b�g������INS��3��ڂ���ƌo�c���Ƒ������B��Ђ͂��߂�2��Ɖ]�����B�p�C���b�g����2��ƁA�ʒu����������Ƃ��A���f�ɍ���Ǝ咣�����B����ȗ��j���������B
 |
�@��؍q��@�W�����{�ւ̃\�A�퓬�@�̃~�T�C���U���C���[�W�B �@�\�A�R�p�C���b�g�̉�b�͎��q�����T�Ă����B �@�\�A�͌��Ă�F�߂Ȃ����߁A���{�͖T����e�����J�����B �@�\�A�@�p�C���b�g�́u�ڕW�͌��Ă��ꂽ�v�Ƃ̕����͗��s��ɂȂ����B |
�@����̔�s�@��100���R���s���[�^������Ă���A�p�C���b�g�͂��̃R���s���[�^�Ɏw����^���邾���ƁA�O�����B�R���s���[�^���̏Ⴕ����ǂ�����̂��B
�@�ł͏��Ȃ��Ƃ�3��𓋍ڂ��悤�B�����Ȃ����B
�@�ł́A���̃R���s���[�^�̓������������ǂ�����́B
�@���̂��߂ɃR���s���[�^�݂͌��̉��Z���ʂ��r���A������������瑽�����̌����ɏ]���悤�ɂ��ꂽ�B�ł́A�Ⴆ�ƂĂ��܂�Ȕ�s�����Ŕ��ł��āA������N���C�Â��Ȃ��܂܂ɕ��u����Ă����o�O���������Ƃ�����B���ꂪ�o�Ă��܂�����A3��Ƃ������͓����Ȃ̂ŁA�������͖��Ӗ��Œė����Ă��܂��A����ȕs�����c���Ă��܂��B
�@��������v���O�����́A��肾����^���A�����i�v���O�����j�́A�ʁX�̐l�ɕʁX�ɏ������悤�B��������o�O�͂����Ă��i�����Ă͂Ȃ�Ȃ������S�ɖ����Ȃ�Ȃ��̂��o�O���j���U���邾�낤���A�ł���Α������̌������܂������Ă���B�V�X�e���̑S�̑��������Ȃ��s���Ȏ���Ɍ�����BAI�͂���Ȗ��̋~����ƂȂ邩�����ƂȂ邩�B
�@�l�ԂƃR���s���[�^�[�̖��́A�R���s���[�^�[���m�̊���������܂��邱�ƂƂȂ����B
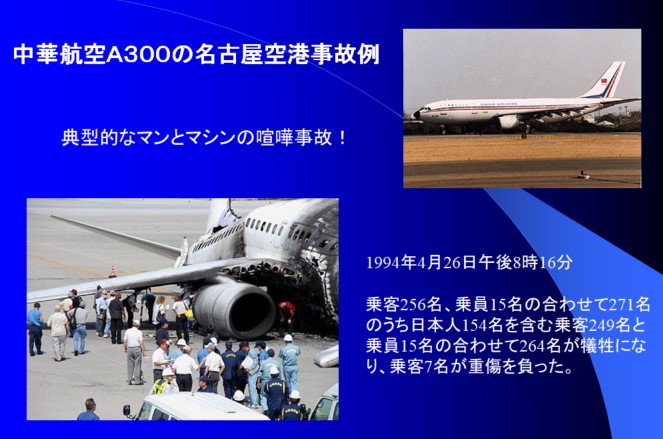
�@1994�N4���̒��؍q�É���`�ė��́A�����c�m��������C����A�i�������ɃG���W���̃R���g���[�����o�[�̂������ɂ���uGO���o�[�v�ɐG��Ă��܂����B�uGO���o�[�v�ɐG���̂̓R���s���[�^�[�ɒ������s�����S�Ɉς˂閽�߂Ƃ��đg�ݍ��܂�Ă���B
�@���͑��c���Ă��镛���c�m���A���ɍ����Ă���@�����A��������m���Ă��Ȃ��������Ƃ��B
�@�ˑR�G���W���͗������͂ɂȂ�@����グ�㏸���悤�Ƃ���B�l�͂��̈Ӗ��������炸�p���[�����@���}���悤�Ƃ���B�R���s���[�^�[�̂ق������̏�Ԃŋ@�v���ǂ���オ��Ȃ��̂��A�i�������Ȃ��H�j�v���O�����ɏ]���A�@��p���R���g���[������i���~�ǂł͂Ȃ��A�����������Ɍ����̂悢�j�X�^�r���[�^�[�ŋ@����グ��B
�@���̌��ʎ������Ċ����H���̍q�q�����q��n�~�n�ɒė����邱�ƂƂȂ����B�@
�u�l�ԂƃR���s���[�^�[�̖��́A�R���s���[�^�[���m�̊���������܂��邱�ƂƂȂ����v�Ə������B
�@���̖��͂��̂܂܃{�[�C���O�Ђ�B-737MAX���̖̂��ɒ������Ă���B
�@B-737�̗��j�͌Â��B�ǂ�ǂ��^�����ꂽ�B���̂��߂ɂ̓G���W����傫������K�v������B���̑傫�ȃG���W���̎��[�X�y�[�X���Ȃ������̂��B�]���̗����ɂ���A�r�̒������������˂Ȃ�Ȃ��B�o�ς̗D��̓G���W�����嗃�̑O���ֈړ������邱�Ƃɂ��A�G���W�����@�̒n��Ƃ̃N���A�����X���m�ۂ����鏈�u�ɂȂ��Ă��܂����B
�@����Ȍ`�̔�s�@����}�p�i�@����グ�đ��C������艺��������ԁj���������Ƃ��A��蓪�グ�̌X�����������Ƃ��B���̎ʐ^�i���ɂ��̉E���j����G���W���i�Z����������̃��[�����g�ނ��Ƃ������ł��邾�낤�B
�@�{�[�C���O�Ђ́A���̂��ƂɋN�����鎸�����̂���������邽�߁A�����̐���n�Ńp�C���b�g���A�V�X�g���邱�Ƃɂ����B�@
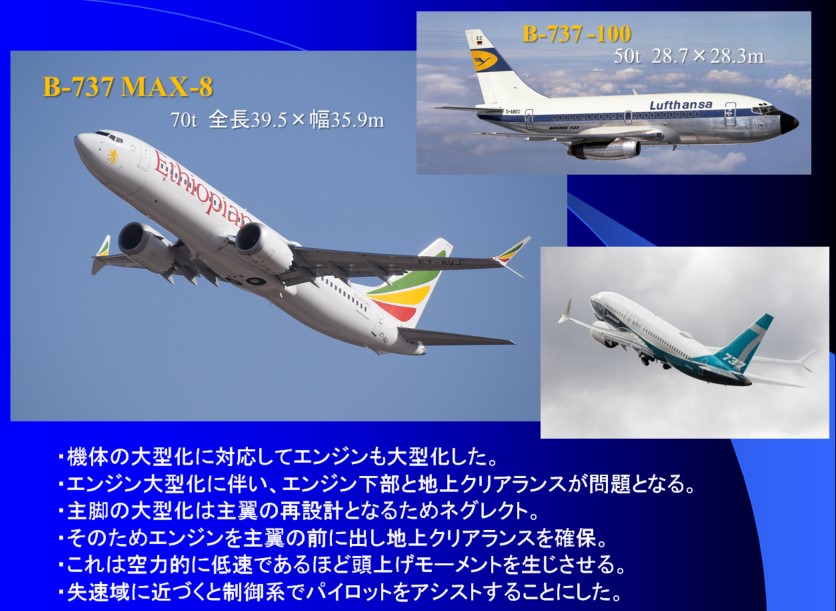
�@���̃A�V�X�g���u��Maneuvering Characteristics Augmentation System (MCAS)�ł��艺�}�����̊T�v���B
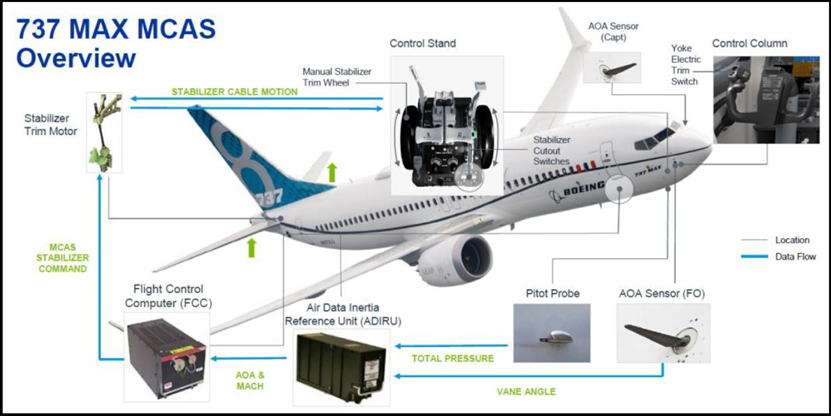
�@AOA(�}���p�j�Z���T�[�͍��E�ɂ���A���ꂪ�傫�Ȍ}���p�����m�����Ƃ��ɁA
�@�@�{�I�[�g�p�C���b�g���g�p���Ă��Ȃ�
�@�@�{�t���b�v���グ���Ă���
�@�@�{�}�Ȑ���
�@�̏��������v�����Ƃ��́A���ł��X�^�r���[�^���쓮���@��������B
�@���̋@��͂Q�x�ė����Ă���B
 �@ �@ |
 |
�@��x�ڂ̎��̂Ń{�[�C���O�Ђ̓p�C���b�g�̐ӔC���Ƃ��āA���ǐ��E����737MAX�ɑ����͎���邱�ƂȂ���s�����邱�ƂɂȂ����̂����A�����ł��Ȃ��̂��B
�@AOA�Z���T��2���邪�ǂ��炩���̏Ⴕ���ꍇ�͂ǂ̂悤�ɔ��肵����n�ւ̌����͂ǂ̂悤�ɂȂ���邩�B
�A�Ȃ�AOA�����Ŏ������x��̂��B���x�⑼�̃p�����[�^�����������đ����I�ɔ��肳���Ȃ��̂��B
�BAOA�Z���T�[�͐��Ă͂Ȃ�Ȃ��Ƃ���B
�C�f�B�X�G���Q�[�W�菇�����m�łȂ��A��������n�ɗD�挠��^���Ă���B
�D767�^���J�[�i�ČR�̋����@�j�ɂ����ڂ��ꂽ���A�R�̃e�X�g�p�C���b�g�ɂ���āA�l�ɗD�挠���^������\���ƂȂ����B
�E�{�[�C���O�Ђ̗ʎY�̐����ێ����邽�߂̌��蔭�ԂƁA���̂ɑ���s�����ȑΉ��B
�@�V�R�V�̑�^���ɔ����A�V�^�@�Ɍg���v���̋��炪���ƂȂ�B�Ⴄ�^���ƔF�肳��Ă��܂�����A�p�C���b�g�������m���q��ǂ���A�}���c�[�}���̌ʂ́A�����@���g�����������K�v�ƂȂ�B����ɂ͂��̗v���̋�������R�Ȃ���K�v�ł���A���Ɉ���œ����Ă���}���p���[���킬�A�^�q��Ђ̌o�c����������B
�@�����Ń{�[�C���O�Ђ́A�V����737MAX�^�@�𐢂ɏo���܂������A�����@�̗v���ł���ΐV���ȓ��ʂȋ����A���Ƌ@�ւɂ�鎎���ȂǕK�v����܂���Ƃ��AFAA�A�����J�A�M�q��ǂ�����ɏ���Ă��܂����̂��B
�@������2��ڂ̎��̂ł����҂͎��ꂪ�����A���ǂ͉^�q��Ђ���ɔ�s��~�����AFAA����Ƀg�����v�哝�̂��哝�̗߂ɂ���Ĕ�s���ւ����̂��B
�@���̓���͂��̎��̂��V�~�����[�^�[�ōĊ肵�����̂ŁA�����L���X�^�[�����ɒu���Đ������Ă���V�[�����B�i�Ȃ�YouTube ����́u���ɖ߂�{�^���v�ȂǂŖ߂��Ă��������j�@
�@�ڂ܂��邵���}��]����G���x�[�^�g�����́A�z�C�[���̓����ɋ����ꂽ���ƂƎv���B

�@���̃z�C�[�����䂵�Ă���R���s���[�^�[�̖\�����~�߂�ɂ́A�ʐ^��STAB TRIM�̃X�C�b�`�ƃR���g���[���R�����i���c�ցj�ɂ��Ă���X�C�b�`���A�@�̂̃g���������߂��˂Ȃ�Ȃ��B
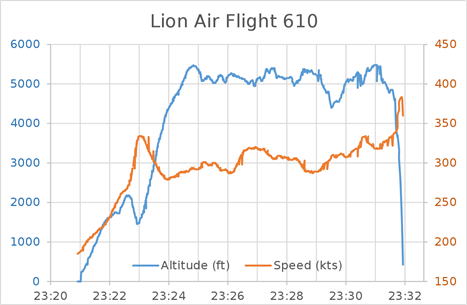
�@��}�͍ŏ��̎��́A���C�I���q��@�̗�������ė��܂ł̎������B���͍��x�ŃI�����W�������x�����A���ꂾ���Ńp�C���b�g�������ɃR���s���[�^�[����ƌ��܂��Ă����̂����悭�킩��B300kt�����x���o�Ă���̂ɁA������������̉̃A�V�X�g�Ȃ��̂��B
�@�R���s���[�^�[��������AOA�ȊO�́A���x��G���W���p���[�Ȃǂ̃p�����[�^���Q�Ƃ��Ĕ��f���Ă���̂ł͂Ȃ����Ƃ���ڗđR���B
�@���������I�v�V�����w�������I���W�i���ł́A�@�̂��Q�Ƃ���AOA�Z���T�[�̓t���C�g���ɍ��E�̃Z���T�[������ւ�邱�ƂɂȂ��Ă��āA�p�C���b�g���I�����邱�Ƃ͂ł��Ȃ��Ȃ��Ă���B������̏ᔻ����A���̃p�����[�^�Ƃ̑������f���Ȃ��Ƌ����v���邵�A�\�������Ƃ��l�������ɑ��nj��������߂����Ƃ��ł��Ȃ��@�\�ɂȂ��Ă����̂��B
�@���É���A-300�̎��̂ŁA�č��́u���B�̋@�̂̓R���s���[�^�[�D�悾���炱�̂悤�Ȏ��̂ɂȂ�v�Ƃ��Ă����̂ɁA���̊Ԃɂ��{�[�C���O�̋@�̂͂�����Ă����̂������B
�@�}�O�l�g�[�̓_�Όn���̑��d���̎v�z�̉������A���܂���Ȏ���ɂȂ����B
�@���V�v���@�ł͗����O�̃G���W���`�F�b�N�ŁA�_�Όn����1�n�����ɉ^�]���āA���n��������ł��邱�Ƃ��m�F����B���̂Ƃ����n���iboth�j�^�]����]�����\rpm������B2�v���O�̓����_�́A�R�Č��������コ���Ă��邱�Ƃ��A�Ȃ�قǂƗ����ł���B
�@��Ŕ�e�������������͂��̃X�C�b�`���I�t�ɂ��āA�Ύ�������̂��B
�@�R���R�b�N���f�ɂ������낤���B�����Ƃ��G���W���㕔�̓��̃^���N����R�������o���Ă��邩��A����͎��Ԃ�ς�����̂ł͂Ȃ����낤���B
�@���̒��O�A�O���̒ė�����Ƃ���G�@�ƁA����̒ǔ��@���痣�E���邽�߁A�X���b�g�����J���Ȃ���@����グ�Ă���B
�@���x���t���Ă��Ȃ��B
�@�G���W������e���Č̏�̂悤���B
�@�����܂����x��������B
�@�����ŁA���̂܂嗃���������Ă�����̃��_�[����t�ɓ��݂��݁A���c���܂ň����A�����ɃX�s���ɓ���B
�@�X�s���͐��]�������̎嗃�͎������Ă���B
�@���̂��ߑ傫���X���ĉ��Ȃ���̍~����s�ƂȂ�B
�@�Е��̎嗃��j�����Ă̒ė��s���̏ꍇ�A�З������S�Ȏ����ł͂Ȃ��̂ŁA���̂Ƃ��̍~����s�́A�X�s���i�����݁j�ł͂Ȃ��A�����~���ƂȂ�B����@��������čs���A�����̂Ƃ���Ȃ����[���i���]�j�~����s���B�����͂�����U�������������B
�@���x�������@�オ������Ԃ���@���f����������ɂ́A�X�s���ɓ����̂������葁���B�������܂ł����S�ȃX�s�����ƁA�l�����c���Ă��邩�Ƌ^���邾�낤�B����ɋ^��ꂽ��A�X�s���͑��x���x�������ɁA�����ǂ�����Ă��܂��B
�@������X�s���ɓ���đf�����@�������Ă��ꂽ��́A�X�g�b�p�[�܂œ��ĂĂ���葫�̑ǂ����X�ɔ����A�ł����]�͑����悤�ɁA���Ɋ����ăG�������i�⏕���j���g�p���āA�����~���Ɉڍs����B��������Α��x���݂�݂����B
�@�X�s���̂Ƃ��͘R�ꗈ��R���K�X���[���������A���x�̉ƂƂ��ɁA���Ȃ��Ƃ��K�X�̒�؏[������͓��ꂽ���낤�B
�@����̓G�@�́A����ɐ�����������悤�Ɣ����Ă��邾�낤���������̂��Ƃ��C�ɂȂ�B
�@�\�A�@�͒ė�����Ƃ���@�̒ǐ��̗v�Ȃ��Ɣ��f�����̂��낤���A����Ƃ��W���[�R�t���R�̐V��@���O�ꂳ��[�ǂ������Ȃ����������Ȃ̂��B
�@�Ƃ����������������@����ނ�͗��E�����B
�@���������~���̍��x�����͑����B���x4000���ł̋��J�n���A����2000���܂ʼn������Ă��܂����B���֍����̖ڈ�ł�����A�n��R�̑Λ����Ă���n���n��܂ł͉����B
�u�m�����n����킩��̔��z�v�ڎ��ɂ��ǂ�
http://www.mf.ccnw.ne.jp/~ad32901/kasukisns/000kasukisns/002nomonhan/002nomonhan.htm

������̑����ڎ��ɂ��ǂ�
http://www.mf.ccnw.ne.jp/~ad32901/kasukisns/kasukisns.htm